

Tesla představila výkonný FSD Computer pro plně autonomní řízení
Během posledních několika týdnů vydala Tesla velké množství vylepšení současného Autopilotu. Ten tak nově umí sám měnit na dálnici jízdní pruhy, zvládá kruhové objezdy, upozorňuje řidiče na červenou na semaforu a také probíhá testování funkce Enhanced Summon, díky které vás Tesla dokáže najít kdekoli na parkovišti. Veškerá snaha o kompletní autonomii by ale byla zbytečná, kdyby Tesla nevyvinula vlastní počítač speciálně pro funkce autonomního řízení. Ten se jmenuje FSD Computer (dříve byl nazýván jako Hardware 3) a v pondělí ho Tesla představila investorům spolu s dalšími novinkami a plány týkajícími se autonomního řízení. Celá akce byla vysílána živě a my vám teď přinášíme souhrn informací, o které se podělili Elon Musk, Pete Bannon, Andrej Karpathy a Stuart Bowers.
Jako první dostal slovo viceprezident hardwarové techniky Pete Bannon, který do Tesly přišel z Applu v únoru roku 2016. V tu dobu začal se svým týmem vypracovávat návrh na integrovaný obvod určený pro umělou inteligenci. K tomuto kroku se Tesla rozhodla z toho důvodu, že na trhu nenašla žádný počítač, který by byl navržen přímo pro neuronové sítě. Celý proces vývoje probíhal poměrně rychle a už v prosinci 2017 tým úspěšně odzkoušel první verzi nového počítače. V dubnu dalšího roku byla vyrobena vylepšená verze, která se do produkce dostala o tři měsíce později. Koncem roku 2018 dostali v rámci testování zaměstnanci Tesly do svých vozů produkční verzi FSD Computeru a v březnu tohoto roku začala Tesla instalovat hardware do nově vyrobených vozů Model S a Model X. Začátkem dubna pak přišla řada i na nejnovější elektromobil od Tesly, Model 3.
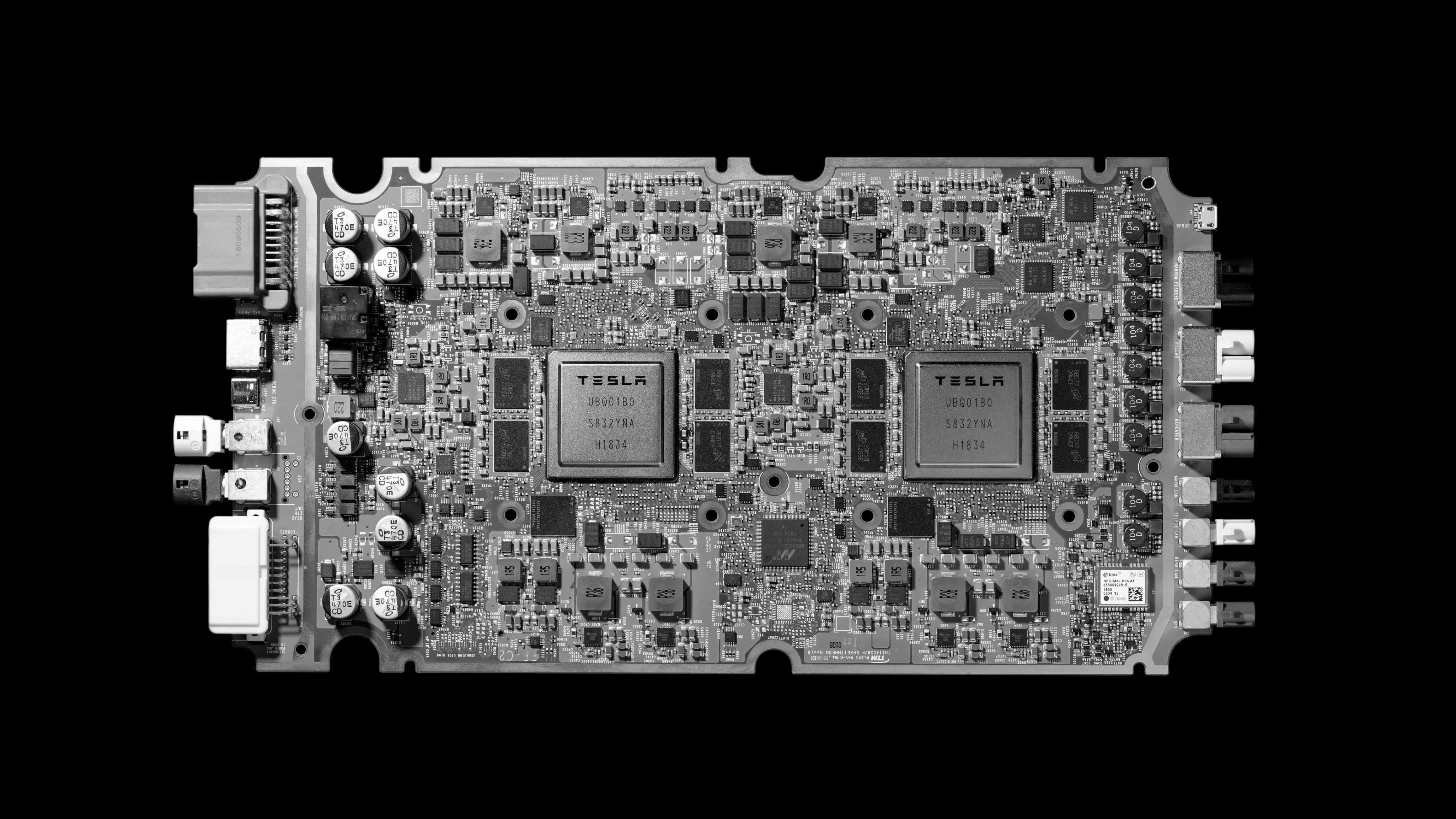
FSD Computer navržený společností Tesla (Zdroj: Tesla)
Bannonova prezentace, která byla v oblasti technických údajů a podrobností téměř vyčerpávající, přinesla první oficiální obrázek FSD Computeru. Na kartě se nachází dva FSD čipy, což zajišťuje redundantnost. V případě selhání jednoho čipu, senzoru, kamery či vstupu, tak může Autopilot stále bezpečně fungovat. Oba dva čipy jinak provádí nezávisle na sobě všechny potřebné výpočty a navzájem si ověřují, zda došly ke stejným závěrům. Poté, co FSD Computer provede žádanou akci, ještě dochází ke kontrole, zda tato akce opravdu proběhla tak, jak měla. K tomu se využívají vstupní data, které si FSD Computer bere z radaru, GPS, map, akcelerometrů, gyroskopů a dalších senzorů. Jeden čip má rozměry 37,5 mm na 37,5 mm a skládá se z 250 milionů logických hradel a ze 6 miliard tranzistorů. Testování čipu probíhá dle standardu AEC Q100, jenž je určený pro autonomní řízení.




Vstupní rozhraní pro kameru zvládá přenášet 2,5 gigapixelů za sekundu, což je dle Bannona o dost víc, než je zatím potřeba. Procesor pro zpracování obrazu je pak navržen tak, aby naplno využíval výhodu HDR obrazu (HDR je zkratka pro high dynamic range, což znamená schopnost zobrazovat širší rozsah jasu). Zároveň podporuje pokročilé mapování tonality (převod na standardní obraz) a redukci šumu. Na jednom FSD čipu se pak nachází dva procesory pro neuronovou síť, které mají statickou paměť o velikosti 32 MB. Paměť dočasně ukládá výstupy, čímž minimalizuje množství dat, které se musí poslat dál, díky čemuž se Tesle podařilo dosáhnout nižší spotřeby energie. Oba dva procesory dohromady zvládají zpracovat 72 teraoperací za sekundu (TOPS), čímž Bannonův tým překonal svůj původní cíl 50 TOPS. Zároveň se jedná o 7násobné zlepšení oproti současnému Hardwaru 2.5.
FSD Computer dokáže zpracovávat až 2 300 snímků za sekundu. Oproti Hardwaru 2.5 od společnosti Nvidia, jenž zvládl pouhých 110 snímků za sekundu, se tedy jedná o více než 20násobné zlepšení. Týmu kolem Bannona se těchto výsledků podařilo dosáhnout při spotřebě 72 W (HW 2.5 měl 57 W), což sám Bannon považuje za úspěch, jelikož cíl byl dostat se pod 100 W. Zlepšení kromě výkonu přišlo též v ceně, FSD Computer je totiž o 20 % levnější na výrobu než jeho předchůdce. Samotný čip je dle Muska „objektivně nejlepším čipem na světě“.
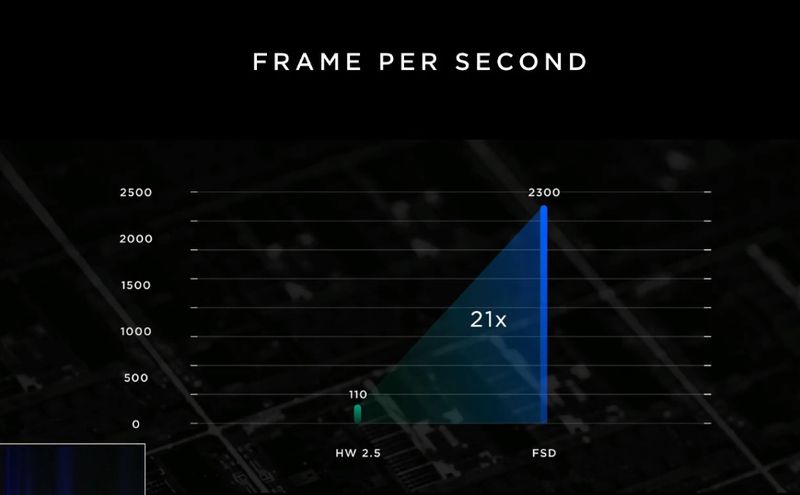
Srovnání výkonu současného hardwaru s FSD Computerem (Zdroj: Tesla)
Bannon uvedl, že se jeho týmu podařilo dosáhnout toho, aby velikost dávky (anglicky batch size) byla rovna jedné. Velikost dávky u neuronových sítí znamená počet vzorků, které sítí prochází. Díky tomu neuronová síť zpracuje příchozí obraz hned po tom, co ho obdrží, což snižuje prodlevu a zvyšuje bezpečnost systému. V případě větší velikosti dávky by jinak neuronová síť musela čekat, než obdrží potřebný počet snímků a až pak by zpracovávala obraz. Ohledně bezpečnosti se později ještě Bannon rozpovídal podrobněji. Systém ověřuje, zda zpracovává autorizovaný kód Tesly. V případě nabourání se do systému třetí stranou by tak FSD Computer neměl provést žádný neautorizovaný příkaz.
Tesla si nechává svůj nový čip vyrábět od Samsungu v texaském městě Austin. Během dotazů po skončení Bannonovy prezentace Musk zmínil, že Tesla již pracuje na druhé generaci čipu pro FSD Computer, která by měla být až třikrát lepší než ta současná. CEO Tesly dodal, že nový čip by měl být hotový za dva roky. Zároveň také padl zajímavý dotaz ohledně toho, jaká je výhoda Tesly, jež má velkou flotilu vozů na cestách, oproti konkurenci, která může neuronové sítě trénovat díky simulacím. Dle Muska je hlavní výhoda v tom, že simulace nedokáží dostatečně zobrazit skutečný svět a různé neobvyklé situace na silnicích.
Další na řadu přišel Andrej Karpathy, který v Tesle zastává post ředitele pro umělou inteligenci. Právě Karpathy a jeho tým měl na starost návrh neuronové sítě a její následný trénink. Karpathy na začátku své prezentace nejdříve shrnul, jak neuronová síť funguje a jak rozpoznává obraz (pokud vám z prezentace nebylo něco jasné, doporučuji zhlédnout toto video) a poté se dostal k tomu, jak se svým týmem trénuje neuronovou síť Tesly.
Jako příklad Karpathy využil rozpoznávání jízdních pruhů na silnici. V praxi trénování vypadalo tak, že člověk na jedné ze situací ručně vyznačil jízdní pruh, čímž vlastně řekl neuronové síti, co by měla vidět. Poté si tým od flotily vozů vyžádá spousty dalších obrázků s podobnou situací a nechává je zpracovávat neuronovou sítí. V situaci, kdy neuronová síť vyřeší situaci špatně je pak nutno výsledek ručně opravit. Neuronová síť pak při dalším výpočtu bere tuto opravu v potaz. Při učení je nutno brát v potaz skutečnost, že je potřeba mít dostatečně variabilní vstupy (například jízdu v tunelu, spojování jízdních pruhů, jízdu po mokré silnici atd.). Dle Karpathyho není ani tak důležitý počet situací, kterými budou neuronovou síť učit, jako jejich variabilita.
Jako příklad potřebné variability byla ukázána situace jízdního kola připevněného k autu. Pokud by neuronová síť uměla pouze rozpoznávat kola od automobilů, pak by pravděpodobně označila auto vezoucí kolo jako dva různé objekty, což by mohlo způsobit problém. Karpathyho tým si tedy musel od flotily nechat poslat podobné situace a označit kolo na autě jako jeden objekt, čímž značně vylepšil rozpoznávací schopnosti sítě.
Z logických důvodů ale Tesla hned nenechává neuronovou síť ovládat auto. Když se síť naučí rozpoznávat novou věc nebo reagovat na novou situaci, tak Tesla vydá update v takzvaném “shadow módu”. V tom systém dělá predikce a trénovací tým ho pak opravuje v těch situacích, ve kterých se spletl. Zapnutý Autopilot pak začne nové schopnosti využívat, až když je Tesla spokojená se spolehlivostí rozpoznávacího procesu.
Zajímavé byly informace o tom, jak neuronová síť zvládá předvídat cestu. Tesla totiž využívá dat získaných od řidičů svých vozů (veškerá senzorika je aktivní i při vypnutém Autopilotu) k tomu, aby systém naučila jak zvládat řízení v různých podmínkách, jako jsou užší klikaté cesty nebo křižovatky. K těmto účelům se navíc dají použít třeba jen data od těch lepších řidičů. Výsledky jsou dle Karpathyho a Muska dobré, Autopilot zvládá s velikou přesností předvídat cestu, aniž by ji dopředu viděl. To se hodí například k vyhodnocení ostré zatáčky a správnému určení nájezdové rychlosti.
Tesla Vision uses path prediction to accurately predict how a road will extend, even when it can’t see around the corner pic.twitter.com/09qPkpqwSC
— Tesla (@Tesla) April 23, 2019
Dále přišla řeč na LIDAR, který Tesla ve svých vozech nepoužívá, jelikož je dle Muska zbytečně drahý a není ho pro autonomní řízení potřeba. Musk dokonce prohlásil, že každá firma, která v problematice autonomního řízení spoléhá na LIDAR, je odsouzena k záhubě. Tesla místo toho využívá kombinaci kamer, radaru a ultrazvukových senzorů. Neuronová síť má totiž tu výhodu, že dokáže dle velikosti objektů rozpoznávat jejich vzdálenost. Tesla k učení této schopnosti používá radar umístěný za předním nárazníkem vozu, ten tak neuronovou síť opravuje a učí místo člověka. Karpathy také zdůraznil, že dobré rozpoznávání z obrazu je velmi podstatné pro autonomní řízení. Bez videa by totiž systém nebyl schopen brát v potaz dopravní značky, semafory, překážky a další důležité objekty. Z videa je také možné získat 3D informace o okolním prostředí i bez použití LIDARu:
This 3D reconstruction shows the immense amount of depth information a Tesla can collect from just a few seconds of video from the vehicle's 8 cameras pic.twitter.com/w2x6pkM2Eb
— Tesla (@Tesla) April 23, 2019
Během následujících dotazů padla otázka ohledně toho, jak si Autopilot dokáže poradit se sněhem na silnici, kdy nejsou vidět jízdní pruhy. Dle Karpathyho Autopilot už dnes dokáže celkem obstojně řídit za silného deště nebo slabého sněžení, zatím ale neuronová síť neumí vyhodnocovat situaci, pokud je celá silnice pokrytá silnou vrstvou sněhu. Karpathy ale také uvedl, že by to do budoucna neměl být velký problém, protože lidé také dokážou jezdit za špatného počasí, takže je jen otázkou softwaru, aby toho bylo možné dosáhnout pomocí neuronových sítí.
Jako poslední se slova ujal viceprezident techniky Stuart Bowers. Ten ve své desetiminutové prezentaci prakticky shrnul to, co Tesla zatím na poli autonomního řízení dokázala. Kromě toho také zmínil, že během testovací jízdy, kdy Tesla natáčela jízdu s Autopilotem, jel vůz bez zásahu člověka více než 30 minut. Bowers poté předal slovo Muskovi, jenž uvedl novou službu Tesla Network. O té se podrobnosti dozvíte v dalším článku.
Záznam celé prezentace:
Podpořte projekt ElonX
- Tesla za první čtvrtletí vykázala dosud nejvyšší zisk, přestože nevyrobila ani jeden Model S nebo Model X - 27. 4. 2021
- Tesla neinvestuje do placené reklamy, ale vydala alespoň krátké spoty pro seznámení s jejími vozy - 12. 3. 2021
- Bližší seznámení s modernizovanými variantami Modelů S a X od Tesly - 29. 1. 2021




Predpokladam, ze s ucenim pribuda hustota kategorizovanych dat a tym padom sa zvacsuje velkost neuronovej siete.
Kde su ulozene v aute, ake mozu byt poziadavky na potrebne ulozisko, ake dostupne ulozisko ma tesla a akeho typu, moze hrozit ze sa dostanu k limitom?
Nerozumím moc NN, ale co chápu tak velikost NN je stejná od začátku, jen vazby mezi neurony jsou náhodné a učením se vazby stávají nenáhodnými, samotná data nejsou potřeba v autě. Výkonější HW umožní větší NN při stejné rychlosti, ale i to má limity. Tuší že pracovat bude muset se všemi neurony pořád…
Aby neuronova siet dokazala pokryt vacsi rozsah situacii musi (aspon podla mojej skusenosti) byt vacsia. Zaroven rozhodne v Tesle skusaju rozne konfiguracie, typy sieti, parametre …
Nasiel som ku tomu nieco na Electrecu: https://electrek.co/2018/10/15/tesla-new-autopilot-neural-net-v9/
“This V9 network is a monster, and that’s not the half of it. When you increase the number of parameters (weights) in an NN by a factor of 5 you don’t just get 5 times the capacity and need 5 times as much training data. In terms of expressive capacity increase it’s more akin to a number with 5 times as many digits. So if V8’s expressive capacity was 10, V9’s capacity is more like 100,000. It’s a mind boggling expansion of raw capacity. And likewise the amount of training data doesn’t go up by a mere 5x. It probably takes at least thousands and perhaps millions of times more data to fully utilize a network that has 5x as many parameters.
This network is far larger than any vision NN I’ve seen publicly disclosed and I’m just reeling at the thought of how much data it must take to train it. I sat on this estimate for a long time because I thought that I must have made a mistake. But going over it again and again I find that it’s not my calculations that were off, it’s my expectations that were off.”
To nerozporuji, jen píšu že neuronová síť neporoste s časem. Možná s updatem pokud se rozhodnout udělat větší NN a přeučit ji, ale to bude plně pod kontrolou Tesly a oni ví co HW v jejich autě zvládne, prostě se nestane že by si z ničeho nic řekli “hups, tohle se tam nevejde”
Myslim, že to velky potencial https://elektrickevozy.cz/clanky/autopilot-od-tesly-zabranil-dalsi-autonehode?utm_source=www.seznam.cz&utm_medium=sekce-z-internetu
To jako myslíte vážně? Takových zásahů má většina řidičů na svém kontě mnoho a nikde se o tom nepíše.
možná….i když nejsem si jistý tou většinou….jistě jsou řidiči, kteří to zvládnou a zvládají a i ti kteří to nezvládnou.
Docela dobré je tohle video https://www.youtube.com/watch?v=_Kti-9qsLpc Je tam patrné, že tesla dík radaru dokáže vidět i několik aut vpřed a brzdit dříve než začne brzdit auto před ním. Někde jsem četl, že to dokáže dík odrazu od vozovky takže nevadí i když je před Vámi kamion přes který ani trochu nevidíte.To člověk asi nezvládne stejně jako některé situace v noci kdy nemá šanci. Pokud něco zvládne dobrý řidič vyřešit, tak to ještě neznamená, že to zvládne i průměrný nebo sváteční řidič. S autopilotem to zvládne “každý” řidič a to je nesporná výhoda.Tady ještě zajímavý sestřih https://www.youtube.com/watch?v=RjGe0GiiFzw
Asi tak. Jen proto, že by se takhle dokázal vyhnout člověk (i třeba ve většině případů), vždycky budou případy, kdy se vyhnout nedokážou, ať už kvůli nezkušenosti nebo chvilkové nepozornnosti. Oproti tomu Autopilotu se takhle stačí vyhnout párkrát a pak v budoucnu se vyhne ve 100 % případů, kde to dovolí fyzika. To je prostě jednoznačné zvýšení průměrné bezpečnosti. A takových situací je spousta a budou stále přibývat.
Bohužel musím se přiznat, že články o Tesle jsou čím dál více tendenční a působí jako PR. Jde o to, že se zde píše stále o jedné straně mince a nikoliv o té druhé. Jako příklad uvedu článek o tom, zda Tesla škodí více než klasická auta (šlo o emise CO2). Každý si může ověřit, že u nás pochází z tzv. obnovitelných zdrojů pouze 13% elektřiny (www.eru.cz)) a to, že to jsou obnovitelné zdroje ještě neznamená, že mají nulové emise CO2. V podobném stylu byl i článek o dopadu Tesly na životní prostředí, kde byly některé údaje záměrně zkreslené a některé vlivy se vůbec neřešily. Navíc by si Tesla měla připsat CO2, které “prodala” Fiatu, ale o tom se přece nemluví, to není nic, co by stálo za řeč přece. Stejně tak podobné je to s články o autopilotu. Pokud náhodou zabrání autonehodě, tak za to může autopilot a člověk by to asi nezvládl (zatím zde byly popisovány dva případy a oba byly naprosto věžné situace, které se stávají dnes a denně). Naopak pokud autopilot zabije člověka, tak je to vždy chyba řidiče, protože měl dávat pozor a měl se věnovat řízení. Docela by mě zajímala statistika, kolik lidi AP zachránil a kolik naopak díky němu a vlastní nepozornosti zahynulo. Podle zpráv je to 2:0 pro tu horší variantu, ale nesleduji to, tak se rád nechám poučit. Další příklad je průšvih Tesly s brzdami, normální automobilka by si to nemohla dovolit pustit do prodeje auto bez důkladného otestování. Tesla to klidně udělala a až když se na to přišlo, tak začali řešit opravu SW.
Mě spíš příjdou tvoje komentáře nekriticky proti tesle. Stačí se kouknout jen na to co si napsal. Ano v čr je 13% obnovitelných zdrojů, ale dalších 40 % jsou jaderné zdroje, což je prakticky ještě čistší energie. Že má tesla chyby to je jasné, ale spíš jde o to, že rozvířila vodu s elektromobilitou, a že posunují vývoj jak v elektromobilitě, tak v autonomním řízení a o to přeci jde, posunout lidstvo zase někam dál.
Nejvíc se mi líbí komentáře lidí brojící proti elektromobilitě, které vyzdvihují pouze negativa stylem, že dojezd je malý, elektromobilita by se měla opustit, ale to je přeci kravina, ano dnešní spalovací auta jsou zatím praktičtější, ale elektromobily zažívají bouřlivý vývoj a všechny tyto argmenty tak budou časem překonány….
Řekni mi tedy, jak si představuješ budoucnost aut? Myslíš že budeme do nekonečná jezdit na benzín/naftu?
No ked sme pri tych emisiach. Mnohokrat som vydel clanky, ktore robia “porovnania” s cielom sokovat. A najlepsie to poohybaju tak, taby to zazracne vyslo lepsie pre spalovacie motory. Najbeznejsi trik je tvarit sa, ze sa pohonne hmoty dostali do nadrze akosi same, ale pri elektroaute sa zapocita aj strata v prenosovej sustave.
Pri fosilnych palivach netreba zabudat na prevoz tankermi cez pol zemegule (a ich sialenu produkciu CO2), nasledny prevoz do rafinerie, samotna rafinacia kde sa mimochodom spotrebuje na 8 litrov cca 8 – 10 kWh elektrickej energie (ktora bola taktiez generovana z uholnej elektrarne, co radi pouzivaju ludia ako argument proti elektroautam, ze ano 😉 ) a este nasledne dalsi prevoz do cerpacich stanic. To vobec nehovorim o tom, ze mnohokrat sa ropa prenasa viac krat. Napr venezuelska tazka ropa by sa bez zmiesania s Americkou lahkou ropou nedala vobec ekonomicky rafinovat.
Nebudem sa tu rozpisovat o ekologickych havariach, lebo tak ako ropne vrty a frakovanie, tak isto boli problem aj s atomovymi elektrarnami, ale ani by som ich nevedel porovnat rozsahom.
Okrem toho v Cesku a Slovensku je velmi vyznamny podiel atomovej enegrie, ktora je velmi cista (halho sa daju dohladat tabulky).
Rozhodne by som povedal, ze elektroauta su celkovo omnoho cistejsie ako auta so spalovacim motorom. O tom by som ani nediskutoval. Bol by som rad keby niekto ku tomu spravil fakt podrobnu studiu nech sa tieto debaty nemusia furt riesit dookola, ale kedze ludia maju kratku pamat, tak by to asi ani nepomohlo, lebo clanok na idnes / topkach zbuchany za dve hodiny bude mat pre vela ludi vacsiu vypovednu hodnotu. A nie nemam Teslu ani ziaden elektromobil, ale 10 rocneho dieseloveho Peugeota 😛
Ivo, kolikrát jsem ti už nabízel, abys napsal kritický článek o Tesle nebo Boring Company? Zatím jsi toho nevyužil…
U toho Fiatu moc nechápu, co by podle tebe měla Tesla udělat. Odmítnout stovky milionů dolarů, které od Fiatu dostane doslova zadarmo? Jistě, můžeš argumentovat, že tím vlastně napomáhá spalovacím motorům, což je v rozporu s její misí, ale já bych to bral spíš tak, že je to její odměna za to, že na rozdíl od ostatních automobilek neusíná na vavřínech. V globálu jsou ty peníze kapička v moři, ale Tesla je alespoň využije k dalšímu posunu celého automobilového průmyslu o kousek blíž k elektromobilitě, kam to stejně směřuje, ať se to tobě a ostatním automobilkám líbí nebo ne.
S tím Autopilotem nevím, jak chceš měřit, kolika nehodám zabránil. To se na rozdíl od nehod v podstatě nedá kvantifikovat. Ale to neznamená, že tam ten přínos není, a může být dost velký. Jinak lidé, kteří umřeli s aktivním Autopilotem, se dají spočítat na prstech jedné ruky, přičemž Tesly s Autopilotem najezdily asi 3 miliardy kilometrů. Přitom jsou tyhle nehody v podstatě jen jiný druh nehody způsobené nepozorností řidiče.
A ty brzdy jsi asi moc nepochopil. Ony nebyly nějaké defektivní nebo nefunkční. Brzdily normálně, ale pokud jsi během krátké doby provedl několik velmi prudkých zabrždění (jako to udělaly Consumer Reports během testování brzdné dráhy), tak důsledkem softwarové chyby se u těch pozdějších brždění trochu prodloužila brzdná dráha. Ale ne nijak extrémně, prostě akorát z nadprůměrného výsledku to vedlo k podprůměrnému výsledku v testu, ale nebylo to tak, že by to nebrzdilo vůbec nebo tak. Takže to byla situace, která by při reálné jízdě v podstatě nikdy nenastala, a i kdyby nastala, tak by to to nebylo nic extra hrozného. Takovéhle menší problémy mají přece auta všech značek, akorát o tom pak nepíšou média po celém světě.
tohle je hloupost. Má cenu argumentovat k věci. Emise a článek k nim tu byl a tam byla diskuze také hodně zajímavá. Plést jí sem nikam nevede. Elektromobil a autopilot není to stejné a nemá cenu mezi to dávat rovnítko a dívat se na to jako na jeden problém.
Je to dan za to, ze Tesla riesi pomerne kontroverznu temu a najviac sa ju snazi tlacit do beznej premavky.
Ked chceme byt uprimny, taktiez sa pri kazdej automobilke nepise kvartalne clanok o jej financnych vykazoch, o nehodach spalovacich automobilov, poziaroch a podobne.
Takze je na druhu stranu legitimne ked sa objavi aj takyto clanok a obzvlast na portal, ktory sa venuje iba elektromobilom.
Jo to mate pravdu. Lide to na silnicich dokazujou každy den. Samozřejmě to byla ironie. Lidi jezdi jak prasata a umiraj každy den. Uměla inteligence aspon nema potřebu jezdit pod vlivem nebo si nehraje na krale silnic.
Nevím, jestli jsem to dobře pochopil, ale jak chce Tesla poznat dobrého a špatného řidiče, aby věděli od koho se mají učit a od koho ne?
Já to chápu tak, že tým, který učí NN, se těmi záznamy probírá ručně, takže prostě kouknou a vidí, jestli řidič například projel křižovatku normálně.
akym sposobom vlastne maju zabezpeceny zber dat zo zakaznickych aut? pochybujem, ze online mozu zbierat z aut surove data, to je priliz velky objem dat
Pochopil jsem to tak, že systém má nastaveny podmínky pro detekci “užitečné” situace a pokud ji systém detekuje, lokálně uloží videoklipy a související data v komprimované podobě, a ta pak odešle Tesle po připojení k WiFi. Užitečnou situací může být to, když řidič s aktivním Autopilotem převezme řízení, případně detekce situace podobné některé dřívější, která se ukázala jako problematická a Tesla potřebuje více příkladů kvůli trénování sítě. Ale těch parametrů pro vyhodnocení situace jako užitečné je spousta a průběžně se přidávají a odebírají podle potřeby.
Předně bych vám chtěl, Petře, poděkovat za skvěle odváděnou práci. Sleduji vaši stránku už docela dlouho a komentáře jsou mou oblíbenou částí, byť jsem do nich nikdy nevstoupil.
Ale zvědavost mě dohnala.
Přispívatel “peter” je členem vašeho týmu, který má za úkol všechno negovat aby se rozproudila debata nebo je jak “placatozemci” a fakta ho míjejí?
Peter členem týmu rozhodně není, i když je stálicí v našich diskuzích. Je to prostě jen poněkud arogantní člověk bez pokory a sebereflexe, který si myslí, že všechno ví nejlíp a není schopen přijmout jakýkoli odlišný názor nebo připustit vlastní chybu, i když řekne prokazatelný nesmysl. Někdy má pravdu a mohl by dobře sloužit jako skeptický protipól přehnaného fanouškovství, ale jelikož jsou jeho komentáře tak arogantní, znepřátelil si většinu ostatních diskutujících. Kvůli tomu pak i jeho rozumné komentáře málokdo bere vážně.
Peter je troll, kterého to rýpání ještě neomrzelo a vypadá to, že ještě dlouho neomrzí, ale tak my už si tu na něj tak nějak zvykli 🙂
jasne, kazdy co neoslavuje muska a jeho napady je troll
aj pri bfr ste kazdeho co hovoril o nerealnosti celokompozitovej rakety takych rozmerov oznacovali za trolla, lebo predsa v spacex to maju vsetko davno riadne spocitane a prebrali vsetky moznosti a bla bla bla, no a kto mal pravdu? no ti trollovia 🙂
jasně peter, jsi šikulka, nu tu máš piškotek 🙂
drbe ti?
No nie nadarmo ste dostali ban na webe kosmonautix.cz. A to už dvakrát. Pán Melechin má neskutočnú trpezlivosť – klobúk dole.
aky pozicaj taky vrat
? Kam to patri?
Už jsme ti to napsali několikrát, tak to zkusím znovu a naposled. Jde o to, jak ten nesouhlas projevuješ, nesouhlasit můžeš s čímkoliv. Ale vše jde napsat slušně, konstruktivně a diskutovat k věci a ideálně to podpořit ozdrojovanými argumenty. Já jsem ochoten kupříkladu snést jiný názor, jsem ochoten i připustit, že se mýlím a omluvit se tu. Jsi schopen toho stejného? Opravdu takto argumentuješ i s ředitelem vlastní firmy? S nadřízeným? S policií? Opravdu?
aky pozicaj taky vrat
mnohi muskfandovia si tiez nepotrpia na slusne a konstruktivne diskusie
Aspon je vidět, že se nedokažeš nad to povznest. Když to dělaj ostatni tak ja taky.
a preco by som sa mal nad to povzniest?
ja niesom z tych, ze ked mi niekto zacne nadavat, ze ustupim, to ani nahodou
Oni to tam nerozebírali, jen to zmínili jako potenciální možnost, jak filtrovat ta data. Myslím, že to bylo v kontextu učení se projíždění složitějších křižovatek.
Ale bylo by zajímavé po letech zjistit, jestli se od Vás Tesla učila, nebo Vaše data raději ignorovala. 😀
Neviem či sa niekde rozoberal “etický kódex” autonómneho riadenia. Predstavte si modelovú situáciu, keď auto riadi v husto zarastenej oblasti autopilot – povedzme ide 100km/h a náhle mu vbehne do dráhy dieťa. Povedzme, že strnutím volantu pravdepodobne zabije posádku, priamou jazdou pravdepodobne zabije dieťa. Ako sa softvér zachová? Ako by ste sa zachovali Vy?
Především bych v nepřehledných oblastech nejel stovkou. Jinak mi to dilema přijde zbytečné, protože pokud náhle někdo vběhne pod kola aniž by byl předtím vidět, tak člověk ani software nestihne udělat prakticky nic, natož nějak výrazně změnit směr vozu. Pokud by dítě bylo vidět dostatečně dopředu, tak dobrý řidič zpomalí, Autopilot by měl udělat to samé.
Přesně tak. Před časem jsem četl dobrý článek o tom, že tahleta morální dilemata jsou v podstatě jen takové myšlenkové experimenty, které jsou v praxi nepodstatné.
Možno “mimo mísu” ale musím s troškou hrdosti napísať že Andrej Karpathy je Slovák a k tomu syn môjho spolužiaka z VŠ on odbor Počítače ja PhD v AI..:)
Dobře chlape 👍
Dle Karpathyho není ani tak důležitý počet situací, kterými budou neuronovou síť učit, jako jejich variabilita.
tymto vyvratil jeden mytus o tom, ze tesla ma velku vyhodu v mnozstve nazbieranych dat oproti konkurencii
lebo nejde o mnozstvo ale o kvalitu dat, zbytocne je mat data z miliard km po dialnici, podstane je mat take data ake potrebuje siet na ucenie a nie len kvantitu dat pricom 99% z nich budu rovnake
potrebne data pre ucenie dokaze zozbierat aj relativne male mnozstvo aut ked pojdu cielene po takych situaciach ktore potrebuju
Jak uděláš, aby ta auta šla cíleně po situacích, která Tesla potřebuje? Těmi okrajovými situacemi se obvykle myslí věci, které si lze těžko představit, natož je simulovat nebo dopředu vědět, kde se dají najít. Máš pravdu, že velká část těch dat je po určité době zbytečná, protože systém se z nich už nenaučí nic nového, ale čím více kilometrů auta ujedou, tím větší je šance, že dostatek aut narazí na ty vzácné situace, z kterých se neuronové sítě můžou učit. Pokud třeba Waymo bude mít data z milionu najetých kilometrů, tak na nějaký konkrétní typ nezvyklé situace za tu dobu narazí třeba jen párkrát nebo ani jednou, což nestačí k tomu, aby se ten software s danou situací uměl příště už vypořádat. Oproti tomu když Tesla ujede za stejnou dobu miliardu kilometrů, na tyto situace narazí 1000x častěji a síť se už z toho může rozumně učit. A je jedno, že 95 % z těch celkových dat je v obou případech k ničemu. Auta uploadují jen ta “zajímavá” data, ne všechno, takže to ničemu nevadí, že ve výsledku je přínosná jen malá část dat.
Přesně 🙂
ak si to nevies predstavi ako to urobis tak skus viac rozmyslat
vies ono to, ze si ty nieco nevies predstavit neznamena, ze si to nevie predstavit niekto druhy 🙂
ono to niesu nijak zvlastne situacie, ved dodnes tesla nevie zvladnut uplne beznu situaciu na svetelnych krizovatkach aj ked viem, ze ty povies, ze interne uz ten build maju, ale nie nemaju, resp. rozhodne ho nemaju v tak pokrocilom stadiu aby sa dalo co i len uvazovat nad jeho nasadenim
a pritom toto je pripad kedy naozaj nepotrebujes jazdit miliony kilometrov, uplne by stacilo prejst si nejake velkomesta krizom krazom, potom zopar malych mesteciek a mas tolko dat, ze viac uz nepotrebujes na to by si mal dostatok dat na ucenie neuronovych sieti rozpoznavat svetelne krizovatky
toto dokazes za par tyzdnov najazdit aj s malym poctom auta a nasledne uz na zaznamenanych surovych datach mozes v pohodli kancelarie ucit a vylepsovat tu neuronovu siet a az ked dosiahnes takmer 100%-nu uspesnost ma zmysel to zacat testovat znovu na realnej prevadzke
tesla ma k dispozicii data(aj ked nie surove) zo statisicov aut a aj tak este nevie rozpoznat stojace auto na ceste, alebo uz sa to naucila?
V tom novém videu je jasně vidět, jak Tesla bez problému jede podle značek a semaforů, takže je nepopiratelné, že Tesla to na nějaké alespoň základní úrovni zvládá, tak nechápu, proč jako kolovrátek opakuješ, že Tesla nezvládá semafory. Samozřejmě nedokážu z jednoho videa posoudit, jak spolehlivé to rozeznávání semaforů je, ale to nedokážeš ani ty, tak nevím, kde bereš tu jistotu, že “rozhodne ho nemaju v tak pokrocilom stadiu aby sa dalo co i len uvazovat nad jeho nasadenim”. A jestli to posuzuješ z Autopilotu v současných autech, tak je to samozřejmě hloupost, když ten se o rozeznávání semaforů ani nepokouší (což ale nutně neznamená, že by to teoreticky nezvládl), takže to není vůbec relevantní.
A zbytek tvého příspěvku je spíš k smíchu. Kdyby to celé bylo tak triviální, jak říkáš, tak už dávno jezdíme v robotaxících Wayma a Uberu. Ale evidentně to tak jednoduché není, protože to právě vyžaduje miliardy reálných kilometrů a postupné pilování a zlepšování celého systému, než to dosáhne extrémní přesnosti a spolehlivosti potřebné pro veřejné nasazení.
A s tím tvým oblíbeným argumentem stojícího auta na silnici mě taky bavíš. Opět zakládáš svůj názor na schopnostech Autopilotu jako asistenčního systému a aplikuješ to na zcela autonomní verzi, kterou Tesla X let vyvíjí interně a jen dílčí technologie vypouští veřejně jako upgrady Autopilotu (NoA, detekce červené na semaforu apod.). Takže protože veřejný Autopilot v minulosti občas mylně detekoval překážku (v minimu případů), máš za to, že Tesla nemůže nikdy vyřešit problém mylné detekce překážek. Opět nedokážu s jistotou říct, že už to vyřešili tak, že systém je perfektní a nikdy překážku nedetekuje mylně, protože samozřejmě nevím, jak pokročilý je jejich interní Autopilot, ale nevidím důvod, proč by to nemělo být dříve nebo později možné vyřešit na dostatečné úrovní spolehlivosti a bezpečnosti. Je to opět jen otázka softwaru.
uz prazdnejsie a jednoduchsie cesty si ani vybrat nemohli 🙂
to, ze nejazdime v robotaxikoch nieje o tom, ze by bolo treba miliardy najazdenych kilometrov na naucenie tych neuronovych sieti a razom by bolo vsetko vyriesene, ale preto, ze tie neuronove siete sa nedokazu naucit s dostatocnou spolahlivostou
keby to bolo len a len o mnozstve dat, mas pocit, ze taky google by si nevedel zaplatit klude tisice mozno aj desattisice aut ktore by par mesiacov brazdili cesty ak by boli presvedceni, ze len toto ich deli od dosiahnutia autonomnej jazdy?
povedzme ze si google kupi 10k aut po 15k dolarov, netreba predsa ziadne luxusne tatose, to mas 150mil. pre google to nieje peniaz
mesacne naklady na jedneho vodica dajme 5k to mas 50mil., rocne 600mil. to tiez google dokaze zacvakat ak by bol potencialny zisk v miliardach
za rok pri beznom pracovnom case by dokazali najazdit 1.4mld kilometrov(160h mesacne a priemer 70km/h) a ak by to boli nejake male prditka so spotrebou 5-6l/100km tak zozeru nejakych 84mil. litrov benzinu co tiez nieje pre google nejaky peniaz co nedakaze zaplatit, plus ine naklady na udrzbu auta
toto by naozaj pre google nebolo tak tazke zaplatit, ak by to malo zmysel a bolo to jedine co im uz chyba k plnej autonomnosti jazdy, lebo potencionalne zisky by boli obrovske
lenze problem nieje v najazdenych kilometroch, ale v nekvalite sucastnych systemov
“máš za to, že Tesla nemůže nikdy vyřešit problém mylné detekce překážek.” kde a kedy som to napisal. nevkladaj mi do ust tvoje domnieky, lebo toto som nikdy nenapisal/nepovedal
ja som napisal, ze naco im je miliarda kilometrov ked nedokazu ani taku zakladnu vec ako detekciu velkych statickych prekazok na ceste 🙂
Já neřeším, jak dobrá prezentace autonomie to je, ale jako důkaz, že to zvládá semafory, to stačí. Na základě čeho se ty domníváš, že Tesla semafory nezvládá? Hlásíš to, jako by to byl fakt, ale všechny důkazy hovoří proti tobě a vlastní důkazy jsi nepředložil.
Waymo už je samostatný subjekt, který nemá k dispozici bezedné pokladnice Googlu a musí dělat finančně rozumná rozhodnutí. Zakoupení desítek tisíc aut jen pro generování dat není ekonomické (už jen provoz a servisování by se velice rychle prodražily bez patřičných zisků z funkční služby), a proto to se to Waymo snaží kompenzovat simulacemi, LIDARem, geofencingem a HD mapami, což je drahé a špatně škálovatelné řešení, na které podle Muska dojedouo. V tom má právě Tesla výhodu, protože tyhle náklady na provoz flotily jsou na straně majitelů aut, takže ta data jsou skoro zadarmo. Nicméně i kdyby Waymo udělalo to, co říkáš, tak jejich 10 000 aut versus statisíce aut Tesly jsou opět nesrovnatelné z hlediska množství generovaných dat.
My všichni právě tvrdíme, že ta miliarda je málo, a proto jsou další data tak důležitá. Nicméně to, že to ještě nedokážou, je stejně jen tvoje domněnka. Vycházíš ze současného Autopilotu, který mají k dispozici řidiči, což není to samé jako Autopilot, který vyvíjí Tesla za účelem autonomního řízení. Samozřejmě je mezi oběma projekty velký překryv, ale z aktuálního Autopilotu nelze vyvozovat potenciální schopnosti Autopilotu navrženého pro autonomní řízení, který bude Tesla mít k dispozici třeba koncem roku.
Třeba u těch statických překážek to může být tak, že auto je dříve dokázalo detekovat jen s 98% spolehlivostí, takže ve 2 % případů brzdilo, i když se o překážku nejednalo. Takovéhle chybné brždění by samozřejmě bylo pro řidiče nepřípustné, a tak je lepší systém nastavit tak, aby statické překážky ignoroval, protože v 99 % případů statická překážka nepředstavuje problém. A na to zbývající 1 % je prostě potřeba spolehnout na řidiče, který má celou dobu dávat pozor. To ale mluvíme o Autopilotu ve vozech třeba před 2 lety, kdy umřel Joshua Brown. Jak víš, že od té doby Tesla systém značně interně nevylepšila a tahle detekce není výrazně spolehlivější? Já to samozřejmě taky nevím, ale na rozdíl od tebe nepředpokládám, že Tesla za 2 roky nedosáhla žádného pokroku. Pokud by Autopilot opravdu měl pořád problém spolehlivě detekovat překážky, pochybuju, že by Musk s takovou jistotou tvrdil, že zhruba za rok bude k dispozici Autopilot schopný zcela autonomní jízdy (i když pořád s nutností dozoru). Jasně, určitě namítneš, že Musk je mluvka a bla bla, ale momentálně nemáme nic moc dalšího, z čeho můžeme vycházet. Ale přijde mi krátkozraké sázet na to, že Tesla nedosahuje žádného pokroku jen proto, že jsme zatím pořádně neviděli schopnosti jejich interního buildu.
waymo patri stale pod alphabet takze ma pristup do bezodnej pokladnice ak by to bolo potreba
a samozrejme tie naklady by sa dali velmi lahko skresat a to vyrazne, ked by stacilo nadviazat spoluprace napr. s taxifirmami a poskytnut im auta a vobec by to nemuselo byt zadarmo a oni by sa uz starali o udrzbu a prevadzku, cize naklady by boli minimalne a mali by pristup k obrovskemu mnozstvu dat
ak niekto povie, ze miliarda najazdenych kilometrov je malo, no tak to znamena, ze ziadne autonomne auto nebude 🙂
miliarda kilometrov musi byt viac ako dostatok aby sa ten system dal vyladit na dostatocnu uroven, ak to samozrejme jeho tvorca vie
ak to nevie tak nepomoze ani desat miliard kilometrov
Bavíme se o obecné miliardě kilometrů, nikoli nějaké selektivní miliardě, která zahrnuje jen nová data relevantní pro nějakou situaci, kterou chceme natrénovat. Takže v té obecné miliardě najdeme poměrně málo kilometrů, které jsou užitečné pro naučení nových schopností, protože drtivou většinu budou tvořit data z dálnic a dalších dobře značených silnic, které už systém zvládá snadno. Proto je těch miliard potřeba tolik, protože s každou další je užitečná stále menší část a jde pak jen o získání co nejvíce reálných příkladů stále vzácnějších okrajových situací, které běžný člověk potká jednou za život nebo vůbec.
ono aj ten google za tie roky uz musi mat archivovanych tolko roznych situacii, ze ked ich prezenie cez novu verziu svojej NN a ona by po natrenovani neurobila jedinu chybu tak po nasadeni do realnej prevadzky musi uz zvladnut samostanu jazdu a to iste plati aj pre teslu
Ano, Waymo spadá pod Alphabet stejně jako Google, ale mám za to, že to jsou finančně oddělené firmy,takže Waymo nemůže jen tak brát z Googlu. Musí to být nějaká ospravedlnitelná investice. Ale třeba se pletu, tak mě kdyžtak někdo opravte.
ale waymo nemusi brat s google, to uz ani nemoze, ale alphabet ho moze financovat podla lubovole a tam koncia vsetky peniaze z google, teda ak to nebude vadit vacsine akcionarov, ale tych by sa dalo spracovat ak im naslubuju miliardove zisky
a inak co mas proti lidaru? odsudzujes to len na zaklade toho, ze “musk povedal” alebo mas aj nejake ine relevatne dovody na to napisat, ze waymo lidarom nieco kompenzuje?
Jestli jsem to dobře pochopil, tak cílem Tesly je (když to hodně přeženu) vytvořit systém, který rozezná svět kolem sebe jako člověk, porozumí mu jako člověk a základě toho se v něm bude pohybovat a reagovat na něj jako člověk.
A na to potřebuje vyvinout spolehlivé počítačové vidění.
A když máte dokonalé vidění, tak nepotřebujete lidar, protože nepřinese žádná další užitečná data, jen stojí peníze.
Člověk také k orientaci nepoužívá laser. Smysl dává radar, který vidí překážky i přes mlhu a sníh, plus UZ senzory na přesné navádění kolem překážek.
Když nemáte počítačové vidění, tak se musíte spolehnout na lidar, který vám umožní představit autonomní řízení dříve.
Lidar se ale stane v určitém bodě vývoje obsoletním a vy jste vlastně zbytečně vyhodili peníze.
Tesla má jiný přístup, prostě dá zákazníkům jen asistenta, na kterém natrénuje neuronové sítě a lidar úplně přeskočí, čímž ušetří obrovské prostředky.
Lidar je dobrá technologie, nikdo pro ní nic nemá, ale je to prostě indikátor nedokonalosti počítačového vidění konkurence.
to je pohlad tesly,ale neznamena to, ze je je to spravne riesenie, resp. jedine spravne
musk velmi rad dava ciernobiele vyhlasenia a jeho fanusikovia to potom opakuju ako takmer nespochybnitelny fakt
Jak tu už někdo zmínil. Lidé taky nemají LIDAR a řídit dokážou bez problému. Takže se opět vracíme k tomu, že to celé je jen softwarový problém, nikoli hardwarový.
no to je super argument fakt na urovni
inak ludia nemaju ani radar a ani ultrazvukove senzory tak naco ich ma tesla? 🙂
Protože radar a ultrazvuk na rozdíl od lidaru skoro nic nestojí a přitom jsou užitečné pro zvýšení bezpečnosti (radar vidí až za auto před vámi), představují částečnou zálohu/kontrolu pro kamery apod.
Navíc, jak Tesla ukázala v aktuálních videích, 3D data a informace o vzdálenosti se dají získat i pomocí kamer a radaru, které na rozdíl od radaru fungují i ve sněhu či mlze, tak proč je podle tebe lidar nezbytný?
ja netvrdim, ze je nevyhnutny, ale rovnako ani, ze je zbytocny a to iste o radar
radar, lidar, kamara, ultrazvuksenzor, kazde ma svoje vyhody a kazde svoje nevyhody aj v ramci kombinacie
použití LIDARU je otázka ceny. Je drahý, ale rychle od něj dostanete data. Za cenu velkých počátečních nákladů “uděláte velký pokrok”. Problém je, že se dal nedostanete bez rozboru obrazu…. nepoznáte jestli to kolo jede za autem nebo je na jeho nosiči, nerozeznáte jestli to co jede před rodičem je kočárek nebo dětské autíčko které může změnit směr atd. Nepoznáte prostě kontext. Čili další krok bude tak jako tak nevyhnutelně vývoj systému pro analýzu obrazu a předvídaní pohybu. Tesla jen řekla, že udělá rovnou krok 2 a dokázala, že trojrozměrný obraz dokáže vytvořit i s použitím kamer (Lidar nepotřebuje) a dál zlepšuje schopnosti rozpoznávání kontextu….to jí sice bude ještě nějakou dobu trvat, ale posouvá se vpřed. Nevylučuji, že konkurenci napadl jiný geniálnější nápad jak vyřešit problémy v druhém kroku…. zatím o nich, ale nikdo nemluví. To že lidé lidar nemají tak proč ho dávat do aut není úplně korektní argument. Lidé mají mozek a to auta dlouho mít nebudou. Nevyhnutelně se tedy autonomní auta musí soustředit na to jak jinými prostředky zajistit srovnatelný výsledek alespoň v oblasti řízení. Pokud se k tomu použijí čidla, radary, lidar atd tak to je naprosto korektní. Tvrdit že musíme použit jen kamer, protože člověk také nemá radar nebo lidar je zbytečně svazující.
Jistě ovšem tu variabilitu získáte jedině množstvím. Je jasné že tisíckrát stejná situace není přínosem. Zároveň ovšem platí jak bylo řečeno, že lidé nikdy nedokáží připravit a vůbec rychle vymyslet tolik situací do kterých se reálně dostanou vozy v ostrém provozu.
ano, nespravis to za jeden den s jednym autom, ale to sa snad nebavime o nejakych dnes zalozenych starupoch, ale o konkurentoch tesly ktori na tom makaju uz tiez niekolko rokov takze uz aj ich auta sa dostali do mnozstva roznych situacii na ktorych sa musi ta ich neuronova siet naucit
takze oni musia mat za ten cas uz k dispozicii tiez ohromne mnozstva dat a to aj v surovej forme, takze nove verzie tych systemov mozu testovat aj bez toho aby museli realne jazdit
Jejich auta se nedostala do takového množství situací jako ty od Tesly už jenom protože jich mají na ulicích málo.
dostali sa do dost situacii
ak tie systemy maju byt len o tom, ze ich “naucis” miliony roznych situacii a len v takom pripade budu fungovat, ale ked sa dostanu do neznamej situacie tak koncia, tak vzivote z toho nebude plne autonomny system
vyssie som dal vypocet(dufam, ze som sa nesekol 🙂 ), ze pre taky google by nebol problem si zaplatit rocne miliardu najazdenych kilometrov ak by si mysleli, ze len toto im chyba ku uspesnemu zvladnutiu autonomnej jazdy
Tady je přesně vidět, že absolutně nemáš ponětí, na jakým principu fungují neuronové sítě. Nikdo je neučí konkrétní situace a jak se v nich zachovat. Ve své podstatě jim ukazuješ spoustu situací a říkáš jim, jak má být správný výsledek a neuronová sít si z toho interně “bere” poznatky, které pak aplikuje v jiných situacích.
Nikdo ji neučí že se má držet mezi dvěma bílýma pruhama, ona to vydedukuje sama s potřebným množstvím dat, stejně jako vydedukuje zatáčku, kterou ještě nevidí podle stromů atd. Právě proto je potřeba ji dodat spoustu krajních scénářů ze kterých si může vzít poznatky jak se zachovat i v dalších krajních scénářích a tady je ta výhoda tesly a množství naježděných kilometrů. Nefunguje to, že by ji někdo naprogramoval tak, že v týhle situaci udělej tohle, funguje víc na principu lidského mozku, že když tady udělala chybu, vezme si z toho ponaučení pro další podobné situace…
A sorry ale v tvých výpočtech ceny zapomínáš na jednu dost podstatnou věc – cena lidarů, senzorů a dalšího příslušenství, která bude o dost vyšší než cena auta. A navíc i s 10 000 aut na tom budou podstatně hůř, než tesla s několika stovkama tisíc aut…
Karpathy tam v prezentaci ukazoval některé zajímavé situace. Například několik náklaďáků položených na sobě a vždycky se dotýkaly silnice jen zadními koly → museli teda naučit síť, aby to vnímala jako jedno dlouhé vozidlo. Nebo třeba auto které při dopravní nehodě letělo vzduchem. Prostě situace, které se na silnici stanou jednou za uherský rok, ale právě díky velké flotile, která pořád posílá data, je NN umí zvládnout.
Ak by ste vystupenie Karpathy-ho pozeral tak niečo podobné sa ho opýtali. On povedal, že nieje dôležité množstvo ale kvalita dát a že si vždy vyberajú, čo použijú, aké situácie, lebo rovná jazda po diaľnici, neprináša neurónovej sieti nič. A simulovať reálne podmienky zvolením vhodných trás pri použití iba zopár automobilov je nonsens ;-). TESLA má neuveriteľnú vývodu flotily automobilov, je to neodškriepiteľné, čím viac áut na ceste tým viac rôznych špecifických situácií. Reálny svet sa nedá simulovať! Vždy by to malo obmedzenia, proste dáta z reálneho provozu sú k nezaplateniu a tie momentálne žiadna automobilka nemá. Napr. v AUDI sa hrajú s RC autíčkom na ploche 4x3m kde ho učia autonómnym funkciám 😀 😀 😀
Předpokládám, že i změnu zákona, přednosti, nějaké změny pravidel, budou nejdříve testovat než ji aktivují všem.
Aneb je hezké, že něco odladí do současného stavu, pokud má být odpovědnost na “železu” (nebo křemíku), tak to předpokládam maj/budou mít smluvně ošetřené. A průběžné aktualizace dělají už teď a asi bez viditelných chyb.
Ano, do Evropy chodí aktualizace se značným zpožděním…je to právě kvůli jiným pravidlům, značkám a podobně.
Spoustu informací. Díky
Rozhodně jde tato technologie dopředu a je to dobře. Ale poté co to semnou kamarád napálil do stromu mám občas problém bejt v klidu i když řídí někdo jiný. Takže auto řízené počítačem zatím raději vynechám 😀
…no vidíš a nejspíš kdyby to auto řídil komp úrovně jaká je zde prezentovaná, tak do toho stromu nenapálíte 🙂
Ukázka autonomní jízdy hezká pominu-li téměr nulový provoz, zakázané podjíždění na dálnici, změna jizního pruhu, kde právě nouzově zastavuje auto na krajnici či jak auto zahne, když se ztratí čára krajnice a zůstane jen středová, tak můžu hodnotit docela dobře.
Nicméně zcela záměrně chybí kontakt s chodci, cyklisty a silný provoz…, který v minulých videích dokresloval nejistotu autopilota 🙂 Škoda, tím pádem není téměř co srovnávat.
Ono je hlavně důležité srovnávat to hlavní. FSD se montuje již měsíc do všech aut. A software je již teď na téhle úrovni.
Ostatní výrobci nemají prakticky nic z toho. Automobilky to berou od dalších výrobců (Bosch), kteří nemají šanci něco tak testovat-učit. Pro Teslu je to teď obří výhoda, kde se každým dnem vzdaluje konkurenci. Co by všichni dali za “shadow mód” možnost testování. Všichni mají jen plno pusu marketingových keců.
“kteří nemají šanci něco tak testovat-učit.”
a preco by to nemali sancu tak testovat a ucit? si myslis, ze oni nemaju vlastnu flotilu aut na ktorych to testuju?
a ako clovek co v tesle ma nastarosti neuronove siete povedal nieje dolezite mnozstvo ale variabilita dat a ta sa da ziskat aj s podstatne mensim mnozstvom aut ako ma tesla
On to možná Michal v článku nenapsal úplně přesně. Andrej říkal spíš, že nezáleží JEN na počtu najetých kilometrů (=počet situací), ale také na jejich kvalitě (=variabilita). Mluvil o tom ve vztahu například k simulovaným kilometrům, kterých může mít firma bambilion a prostě nikdy to nebude stačit na vychytání dostatečného procenta těch málo obvyklých situací. Doporučuju si tu prezentaci pustit. V článku je to všechno samozřejmě velice zjednodušené a zdaleko není pokryto všechno, o čem mluvili.
Ona je ta věta hlavně vytržená z kontextu. Protože v článku jsem to psal v rámci učení rozpoznávání jízdních pruhů. Tam Karpathy říkal něco ve stylu toho, že kdyby do NN dali jen vstupy z rovné dálnice, tak by pak Autopilot neuměl zatáčet. Proto jsou potřeba i situace v zatáčkách, během deště, v tunelech apod. Je pravda, že tohle jsou situace, na které není potřeba extra velká flotila vozů (kdyby byla, tak autonomní auta konkurence nabourají v první zatáčce). Výhoda velké flotily je znát právě v těch ne úplně obvyklých situacích, v získávání dalších podobných situací (konkurence by musela jezdit a ony situace hledat, Tesla si prostě vyžádá od flotily snímky) a v shadow modu, který umožňuje testovat nové funkce ve velkém.
Ten podstatný rozdíl je v tom, že x stovek, max tisícovek testovacích aut, co mají jiní k dispozici, navíc velmi často na omezném území, tedy v omezeném množství situací. Plus tedy simulace, které ale někdo musí nachystat, tudíž nepokryjí rozmanitost reality, prostě nedokáží tak rychle získat a zpracovat to ohromné množství dat, které má teoritecky Tesla ze všech aut na světe. Jde o stovky tisíc aut a během pár měsíců půjde o desítky tisíc aut s HW3, které budou sbírat velice různorodá data. To je myslím ta nejvetší konkureční výhoda Tesly. Zda toho dokáže využít je pak otázka druhá. Z videí mi přijde Waymo pořád dál (auto v městském provozu).
V USA se muze predjizdet zprava.
předjíždění na dálnici je OK.Není to natočené u nás. Auto zastavující u krajnice ..nějak nevidím problém..přesně podle předpisů(řidiči se občas chovají jinak viz. přejíždění před připojovacím pruhem…což ovšem neznamená, že je to dle předpisu) Problém kdy se ztratí čára nevidím, koneckonců jede dobře i v místech kde čára není. Spíš by mne zajímalo jestli už vyřešili problém se záměrně chybně nalepenou čárou, nebo situaci kdy se čáry překrývají dík rekonstrukci.
U chodců je to otázka předvídání a bezpečného nastavení. U předchozích videí bylo patrné, že systém má problém pokud chodec stojí nebo se zastavuje. V té chvíli bylo patrné, že autopilot řídil opatrně nebo zastavil. Prostě předpokládal, že chodec může vstoupit do vozovky a podle toho zachoval odstup. Není nic překvapivého, že v této fázi je nastavení autopilota opatrnější. Tam kde by řidič neřešil a v situaci náhlého vybočení dítěte do vozovky by ho prostě nevyhnutelně srazil, se počítač evidentně snažil vždy tento scénář předpovědět a dle toho se řídil. Nový čip, který zvládne dělat rychlé předpovědi pohybu nejspíš povedou k postupnému uvolnění restrikce.
Nulový provoz? Jistě, nebyla to městská špička, ale ta dálnice byla docela plná. Pravda interkace s chodci apod. tam chyběla, ale zase Tesla autopilota pouští pomalu a postupně a primárně chápu jeho záměr jako pomoc na dálkových trasách (dálnice, okresky), ne město. Tam to ještě chvíli bude trvat. Tedy viděl bych to na level 3 vcelku brzo (technicky vlastně už nyní je), něco na úrovni 3,5v nejbližší době a pomalu přechod k levelu 4. Podjíždění na dálnici v USA není přestupek, na těch čtyř, pěti, šesti, sedmi i osmiproudých cestách v jednom směru to ani jinak nejde. Naprosto běžně se tam jezdí ve všech pruzích a různými rychlostmi. To, že je něco pravidlem v ČR, případně v evropě neznamená, že to tak má zbytek světa. Ostatně myslím si, že pro autonomní řízení bude Evropa daleko tvrdší oříšek než USA (více značek, větší složitost křižovatek, užší silnice, dlažba apod.). V kterých časech jste viděl to nouzové zastavení a zahnutí když se ztratí čára?